以前から噂がありますが、えらく多種多様な装備が実装されそうですね。
車線逸脱警報システムの特許
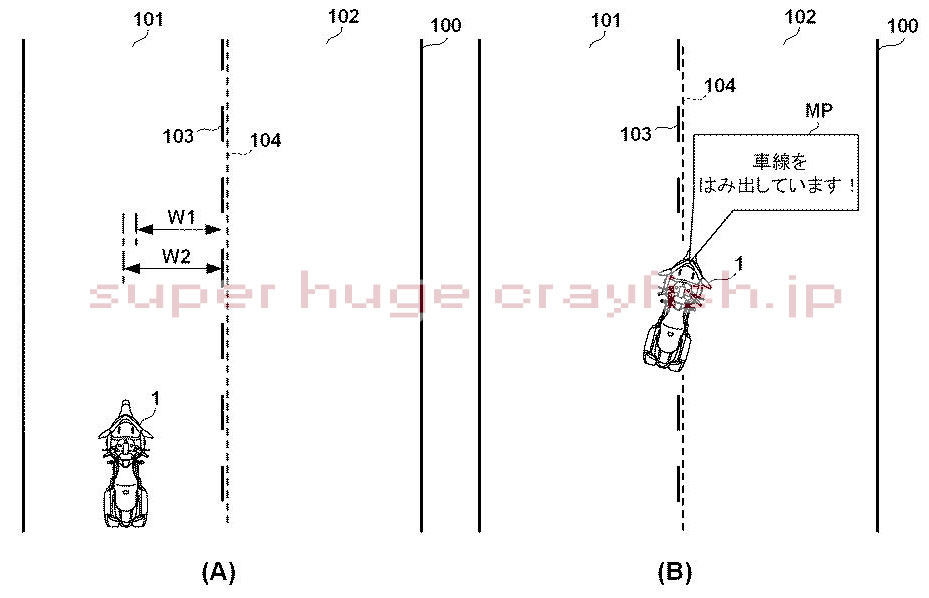
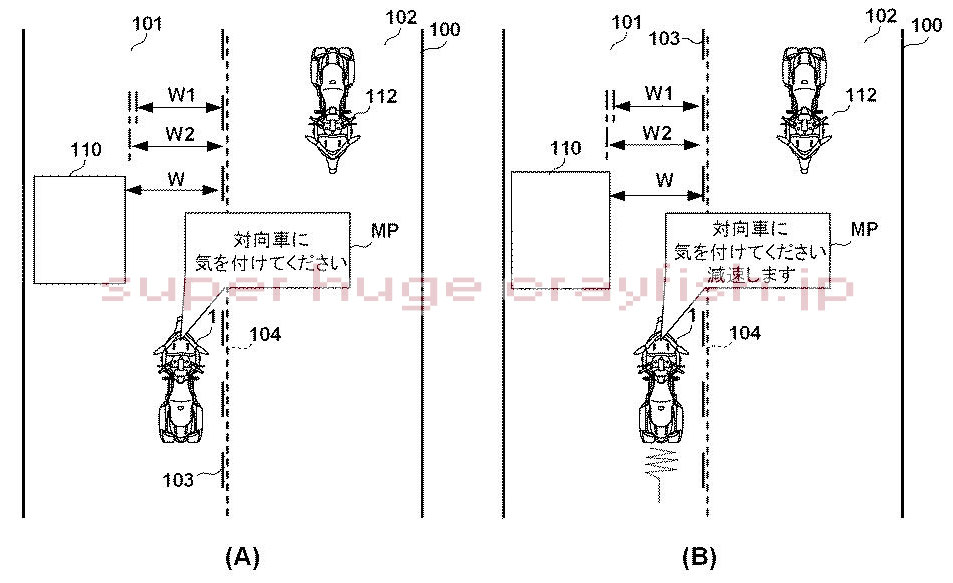
鞍乗型車両に適した車線逸脱の警報を発すること。
2020年3月出願の特許です。
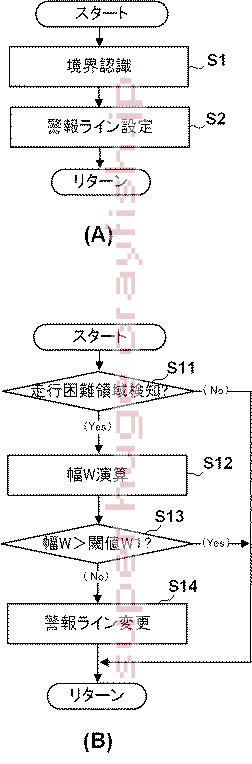
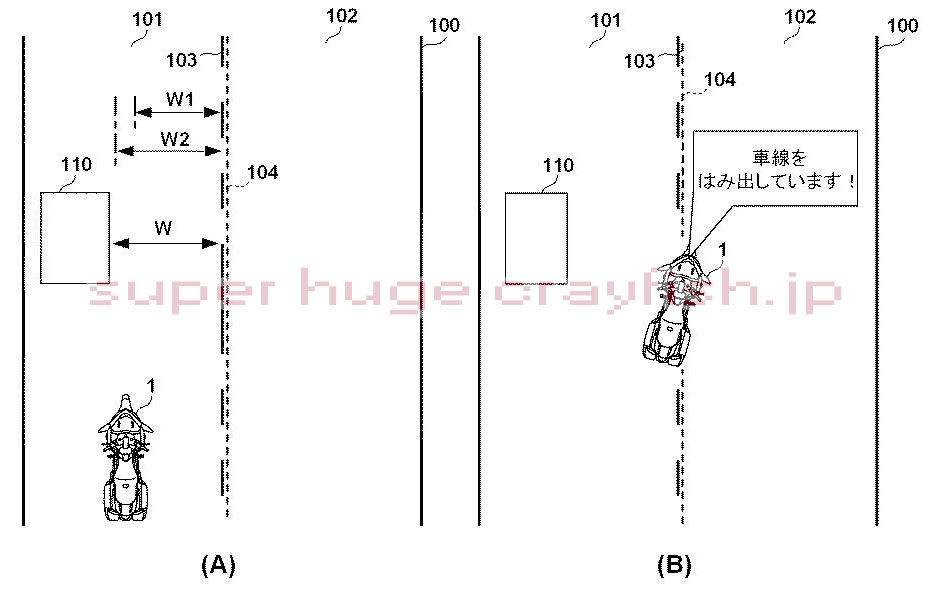
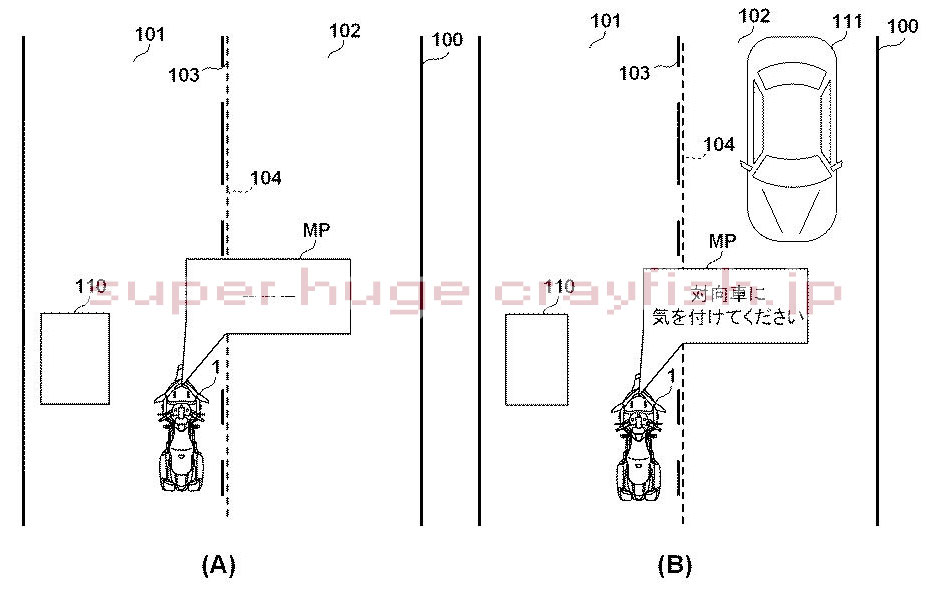
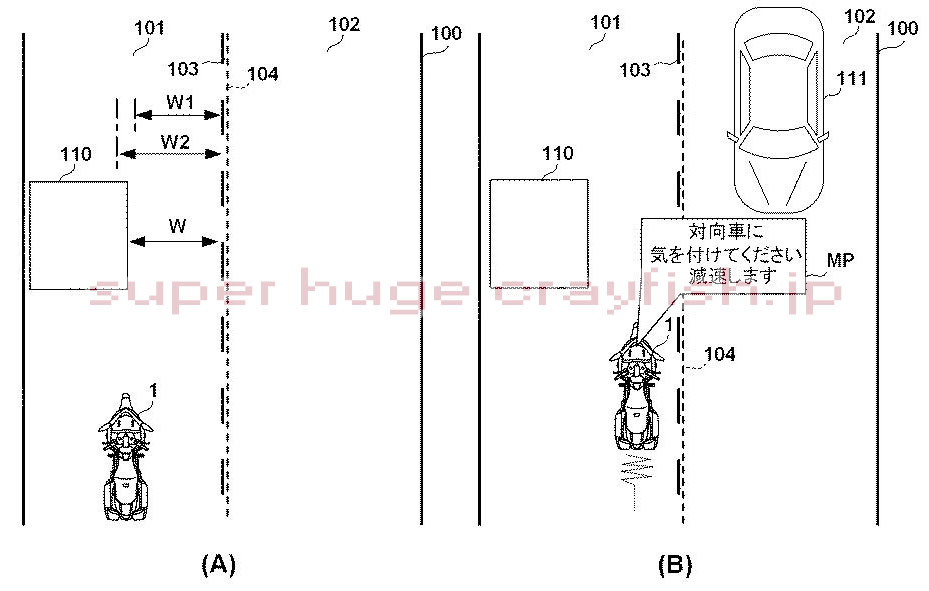
鞍乗型車両は、自車両の走行車線と対向車線との境界に警報ラインを設定する設定手段と、前記自車両が前記警報ラインを跨いだ場合に警報を発する警報手段と、前記走行車線上の走行困難領域を検知する検知手段と、前記検知手段により前記走行困難領域が検知された場合に、前記境界と前記走行困難領域との間を、前記自車両が通過困難か通過可能かを判定する判定手段と、を備え、前記設定手段は、前記判定手段が前記自車両が通過困難と判定した場合は、前記警報ラインの位置を前記境界から前記対向車線の側にずれた位置に変更する一方、前記判定手段が前記自車両が通過可能と判定した場合は、前記警報ラインの位置を変更しない。
車線逸脱警報装置の特許です。
ゴールドウイング向けの特許
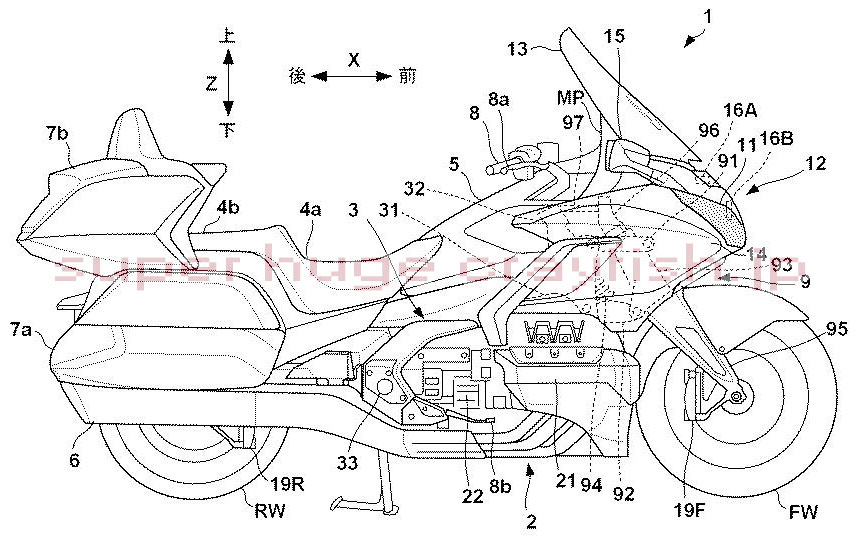
鞍乗型車両1は、長距離の移動に適したツアラー系の自動二輪車であるが、本発明は他の形式の自動二輪車を含む各種の鞍乗型車両に適用可能であり、また、内燃機関を駆動源とする車両のほか、モータを駆動源とする電動車両にも適用可能である。以下、鞍乗型車両1のことを車両1と呼ぶ場合がある。
車両の図はゴールドウイングです。こういう装備はゴールドウイング向けですよね。
地図と連動して判断してるよ
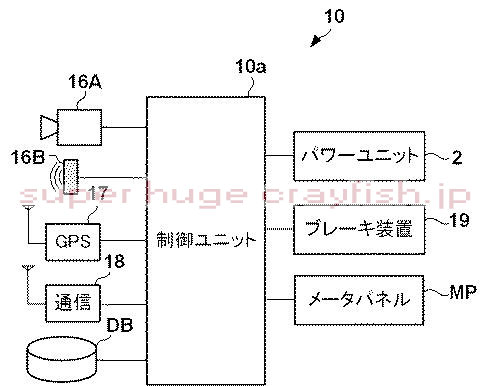
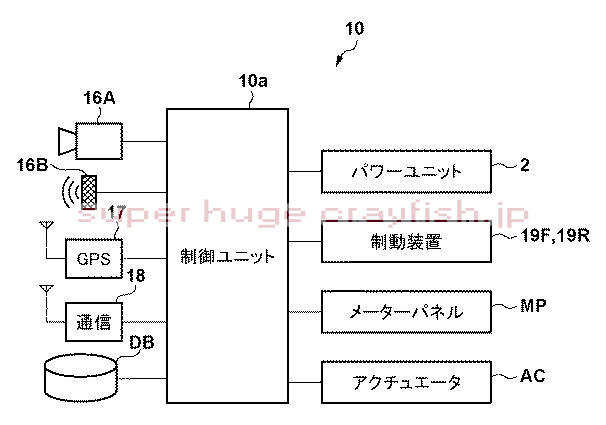
制御ユニット10aは、撮像ユニット16A及びレーダ16Bの検知結果を取得して、車両1の周辺の物標、道路状態を常時認識する。また、制御ユニット10aは、GPSセンサ17、通信装置18、地図情報データベースDBから情報を取得する。GPSセンサ17は、車両1の現在位置を検知する。通信装置18は、地図情報や交通情報を提供するサーバと無線通信を行い、これらの情報を取得する。地図情報データベースDBには、高精度の地図情報を格納することができ、制御ユニット10aはこの地図情報等に基づいて、走行中の道路の形態や車線上の車両1の位置をより高精度に特定可能である。
カメラ等だけではなく地図データ等と連動して車線とか判断するみたい。へーすごい。車のもそうなんだろうか。
色んなパターンに対応するよ
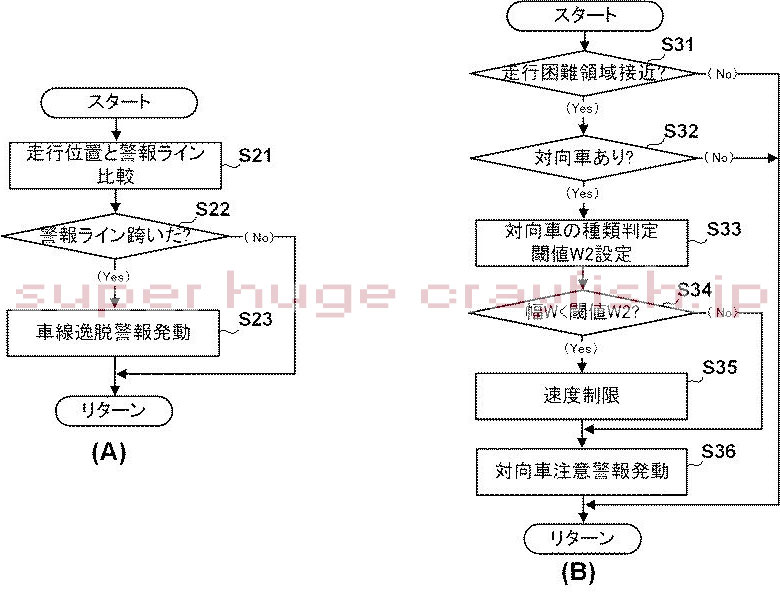
こちらフローチャートです。
上記の通りに色んなパターンで警報してくれるよ。かしこくてえらいね。2021-144331です。
車線逸脱抑制の特許
鞍乗型車両に適した運転支援技術を提供する。
2020年3月出願の特許です。
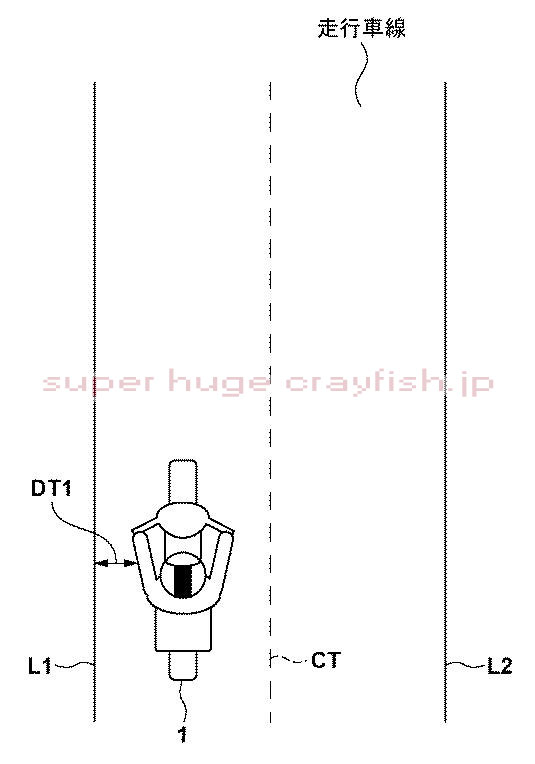
鞍乗型車両1は、自車両の走行車線を検知する検知手段と、検知手段により検知された自車両の走行車線内で、且つ、当該走行車線の中央よりも端の側を自車両が走行するように、自車両の車幅方向の走行位置を制御する制御手段と、を有する。鞍乗型車両1の制御手段は、検知手段により検知された自車両の走行車線内において、当該走行車線に対向する対向車線の側の端L2とは反対側の端L1の側で、自車両の車幅方向の中心位置が端L1から車幅方向に所定の距離DT1だけ離れた位置と一致するように、自車両の左右方向の走行位置を制御する。
こっちは車線逸脱抑制ですね。制御があるよ。
アクチュエーターがハンドルを制御するよ
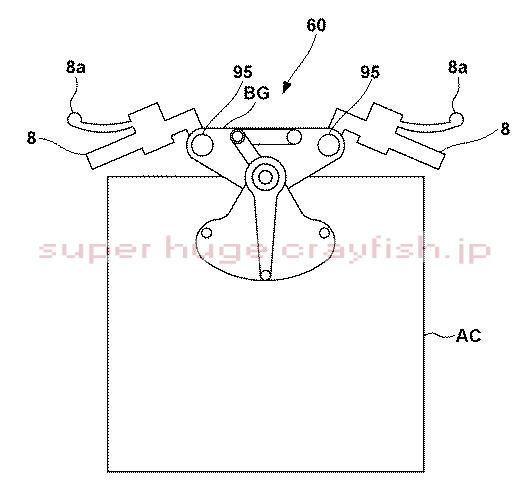
自車両の左右方向の走行位置は、制御ユニット10aが操舵機構60に駆動力を与えるアクチュエータACを制御する(前輪FWを操舵する)ことによって制御可能である。
ハンドルにアクチュエーターがついてるよ。それでハンドルを制御するよ。
ちなみにそれに関しては過去に特許が出願されています。
避けてくれたり止めてくれたり
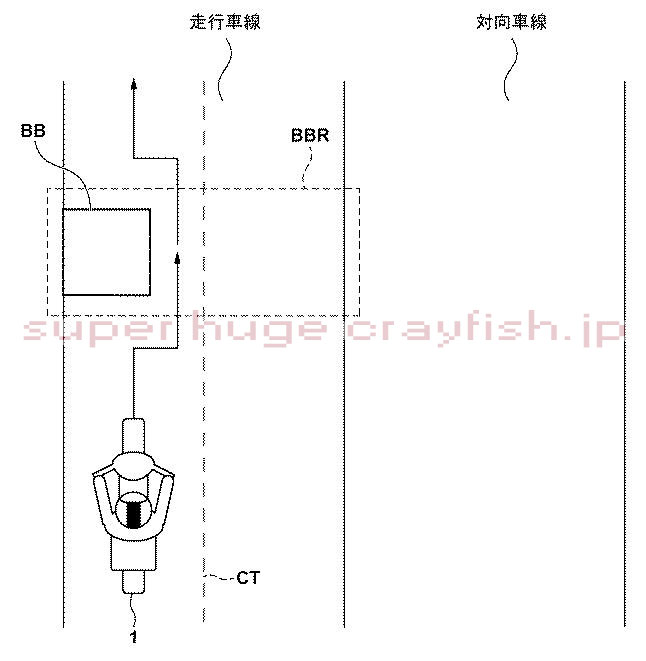
障害物BBが検知された場合には、走行車線内の障害物BBが存在する領域BBRのみにおいて、障害物BBが存在する側の端とは反対側の端の側を自車両(鞍乗型車両1)が走行するように、自車両の左右方向(車幅方向)の走行位置を制御してもよい。そして、障害物BBが存在する領域BBRを自車両が走行した後、走行車線内において、障害物BBが存在する側の端の側(図7では、左側)を自車両が走行するように、自車両の左右方向の走行位置を制御するとよい。
上記の通りに障害物を避けてたあとに、元の場所に戻ったり
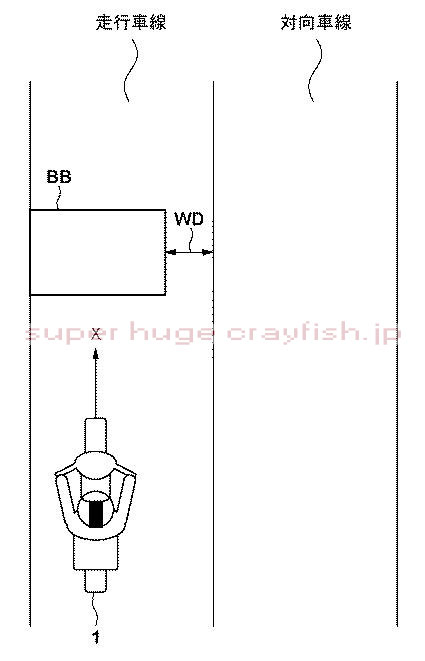
障害物BBが走行車線に存在する場合には、障害物BBの大きさによって、自車両(鞍乗型車両1)が走行車線を走行することが困難となる可能性もある。そこで、図8に示すように、撮像ユニット16Aやレーダ16Bを含む検知デバイスによって障害物BBと走行車線における障害物が存在する側の端との間の幅WDを検知し、幅WDが所定の幅以下である場合には、制御ユニット10aは、LKASを解除して、自車両の走行を停止させる。
停止してくれたり。2021-152780です。
アダプティブクルーズコントロールの特許
鞍乗型車両に適した運転支援技術を提供する。
2020年3月出願の特許です。
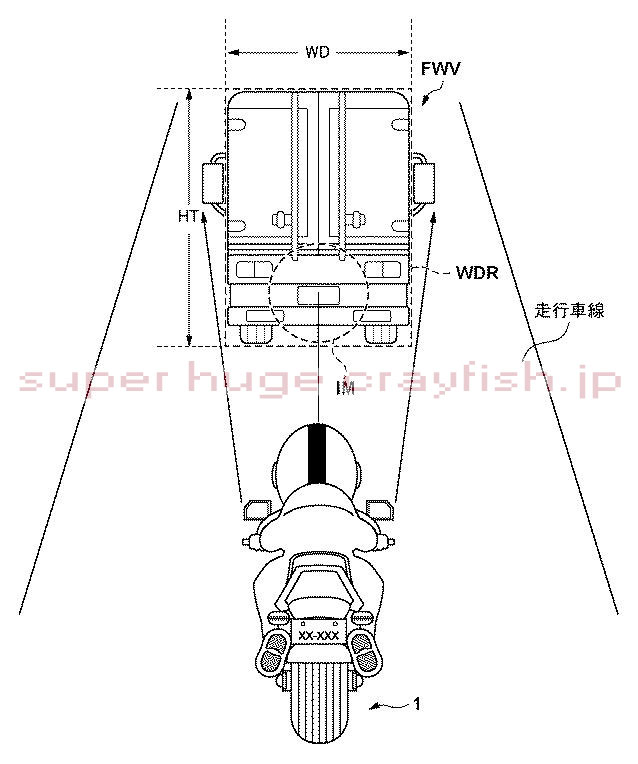
鞍乗型車両1は、自車両の前方に存在し、自車両の走行車線を走行する四輪車両FWVを検知する検知手段と、検知手段により四輪車両が検知された場合に、四輪車両の走行に自車両の走行を追従させる追従走行制御を行う制御手段と、を有する。検知手段は、四輪車両の車幅WDを検知し、制御手段は、追従走行制御において、自車両の少なくとも一部分が四輪車両の車幅内の領域に収まるように、自車両の車幅方向の走行位置を制御する。
アダプティブクルーズコントロールの特許です。ライダーの図がかわいいですね。
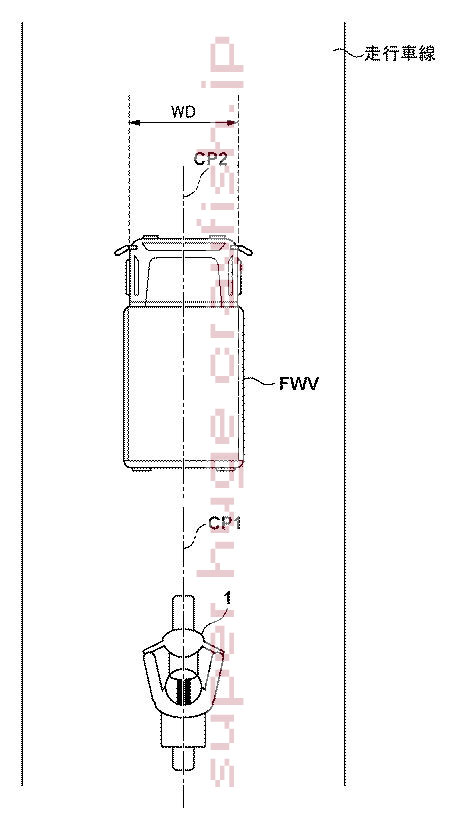
前走者の幅に収まるように自車両を制御したり、前走者の幅の中心になるよう自車両を制御したり、前走者のカーブを検知して、カーブしている側の端にくるように自車両を制御したり。
その他色々なパターンを検知して、それに応じた制御をしてくれるよ。2021-152781です。
電子制御サスペンションの特許
鞍乗り型車両において、センサを車体の重心により近い位置へと配置し車体の挙動をより高精度に検出する。
2020年3月出願の特許です。
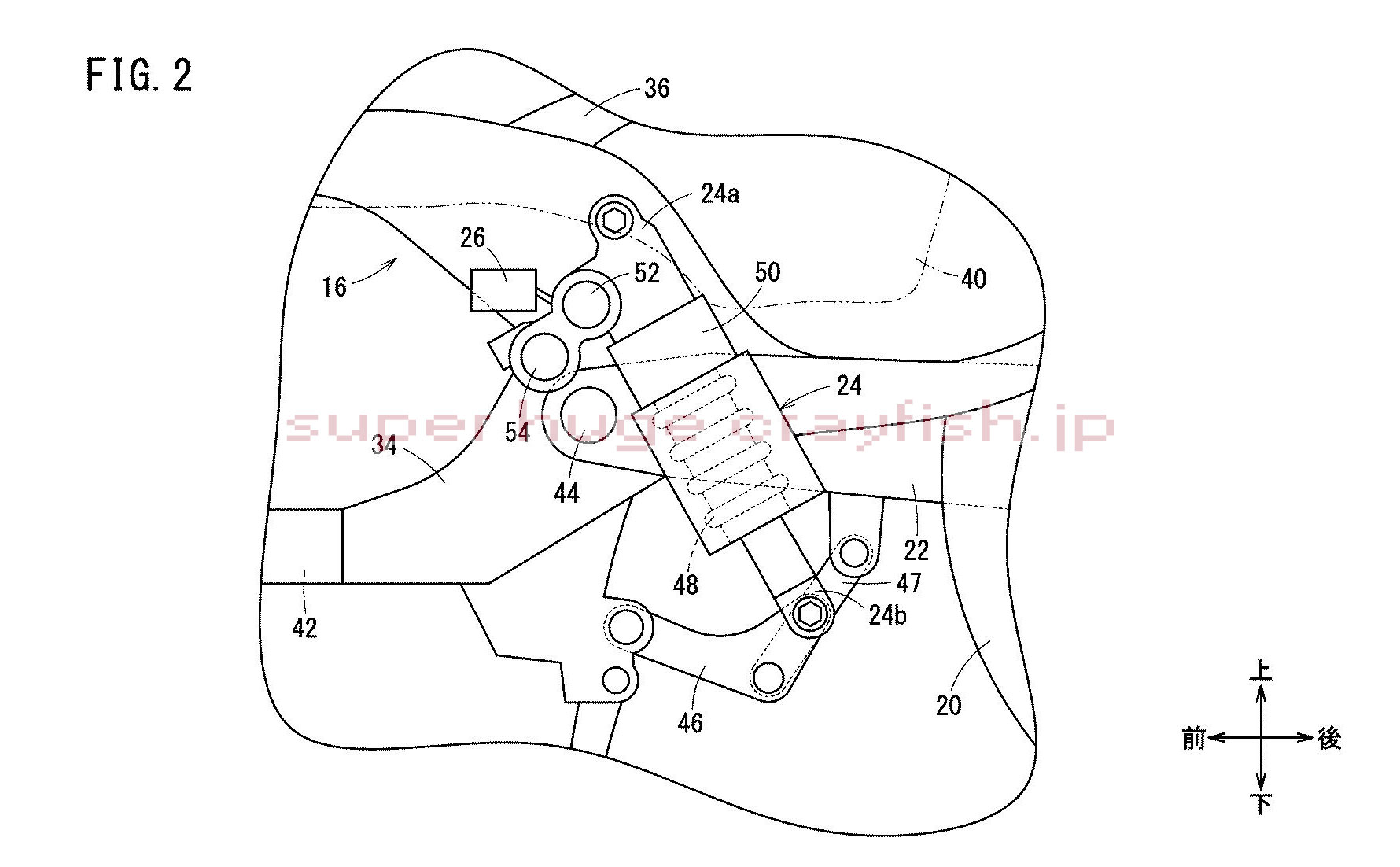
鞍乗り型車両10は、車体フレーム16と、該車体フレーム16のピボットフレーム34に対して揺動自在に支持されたスイングアーム22と、前記スイングアーム22に支持されたリンクアーム46と前記ピボットフレーム34とを連結し作動油によって減衰力が制御されるリアサスペンション24とを備える。また、リアサスペンション24に設けられ作動油の蓄えられるサブタンク54と、走行中における車体の挙動を検知する検出センサ26とを備えている。そして、鞍乗り型車両10を上方から見た上面視において、サブタンク54と検出センサ26が重なるように配置される。
電子制御サスペンション系の特許です。
車両の図はゴールドウイングですね
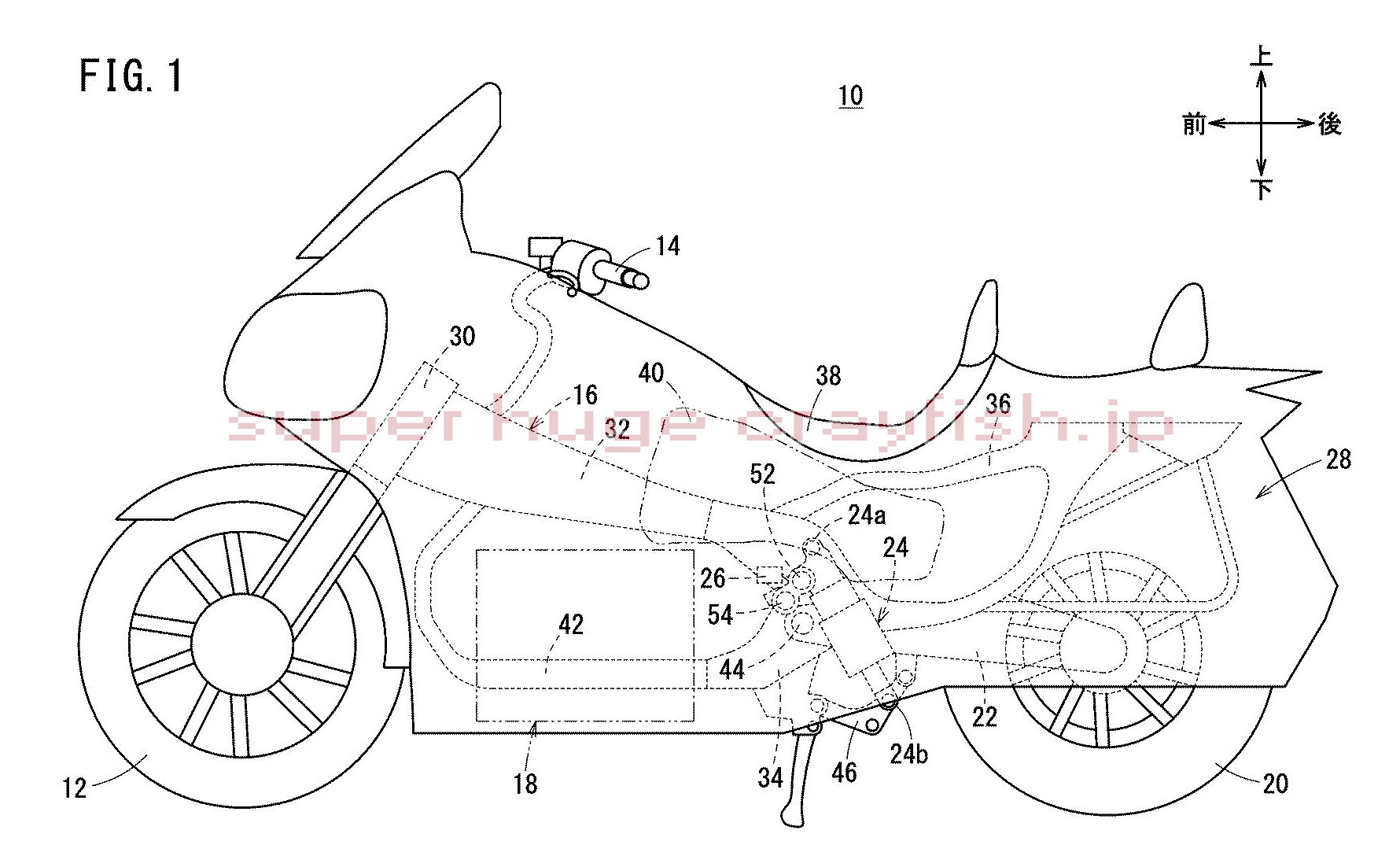
こちらアバウトですが、大体ゴールドウイングです。
フレームとかに関してもそんな感じですよね。
出願タイミング的にもゴールドウイング向けと見ていいと思います。
電子制御サスペンションの特許
車体をバンクさせて旋回する車両のサスペンション制御装置において、車輪速センサーの検出情報からサスペンションのストローク量を正確に推定可能とする。
2020年3月出願の特許です。
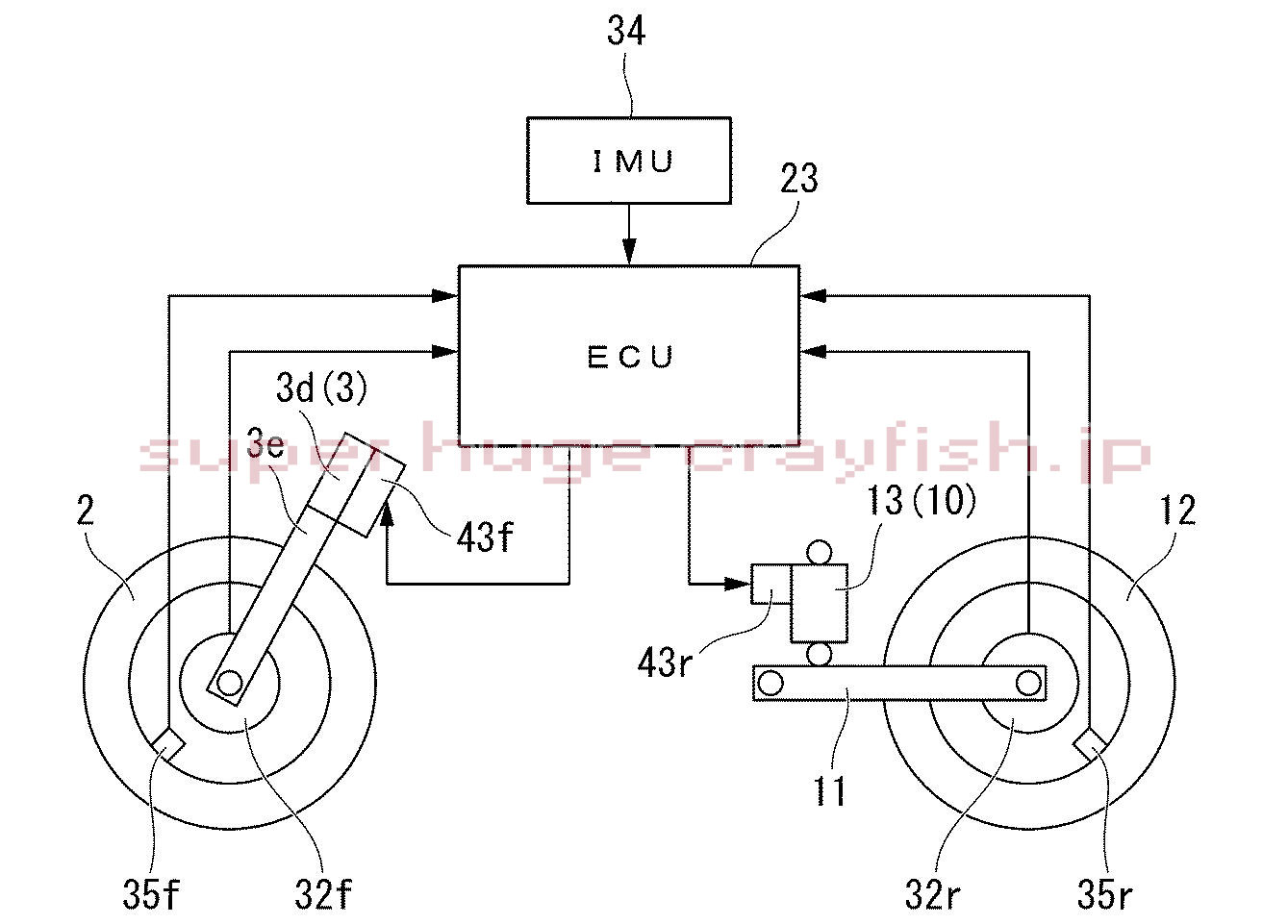
前後輪2,12を懸架し、前後輪2,12からの荷重入力でストロークする前後クッションユニット3e,13と、前後輪2,12の回転速度を検出する前後車輪速センサー32f,32rと、自動二輪車1の旋回状態を判定するためのパラメータ(タイヤ空気圧)を検出するパラメータ検出手段(前後タイヤ空気圧センサー35f,35r)と、車輪速センサー32の検出情報を用いて前後クッションユニット3e,13のストローク量を推定する制御部23と、を備え、制御部23は、パラメータ検出手段の検出情報から自動二輪車1の旋回状態でないと判定した場合に、前後車輪速センサー32f,32rの検出情報によるストローク量の推定を行う。
こちらも電子制御サスペンションの特許です。
車両の図はゴールドウイング
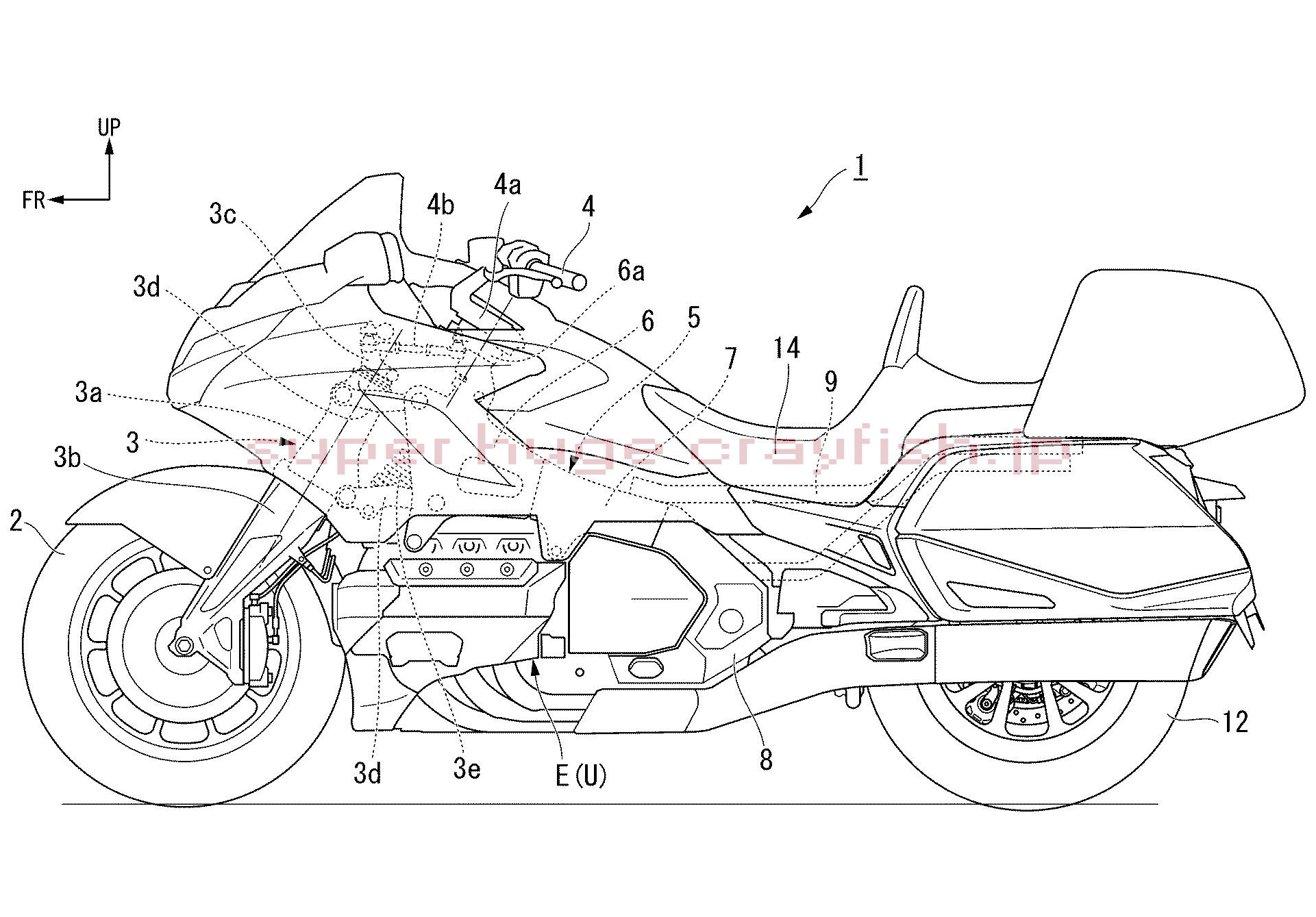
車両の図は普通にゴールドウイングです。なのでこの特許もゴールドウイング向けでしょうね。
色々センサーついてる
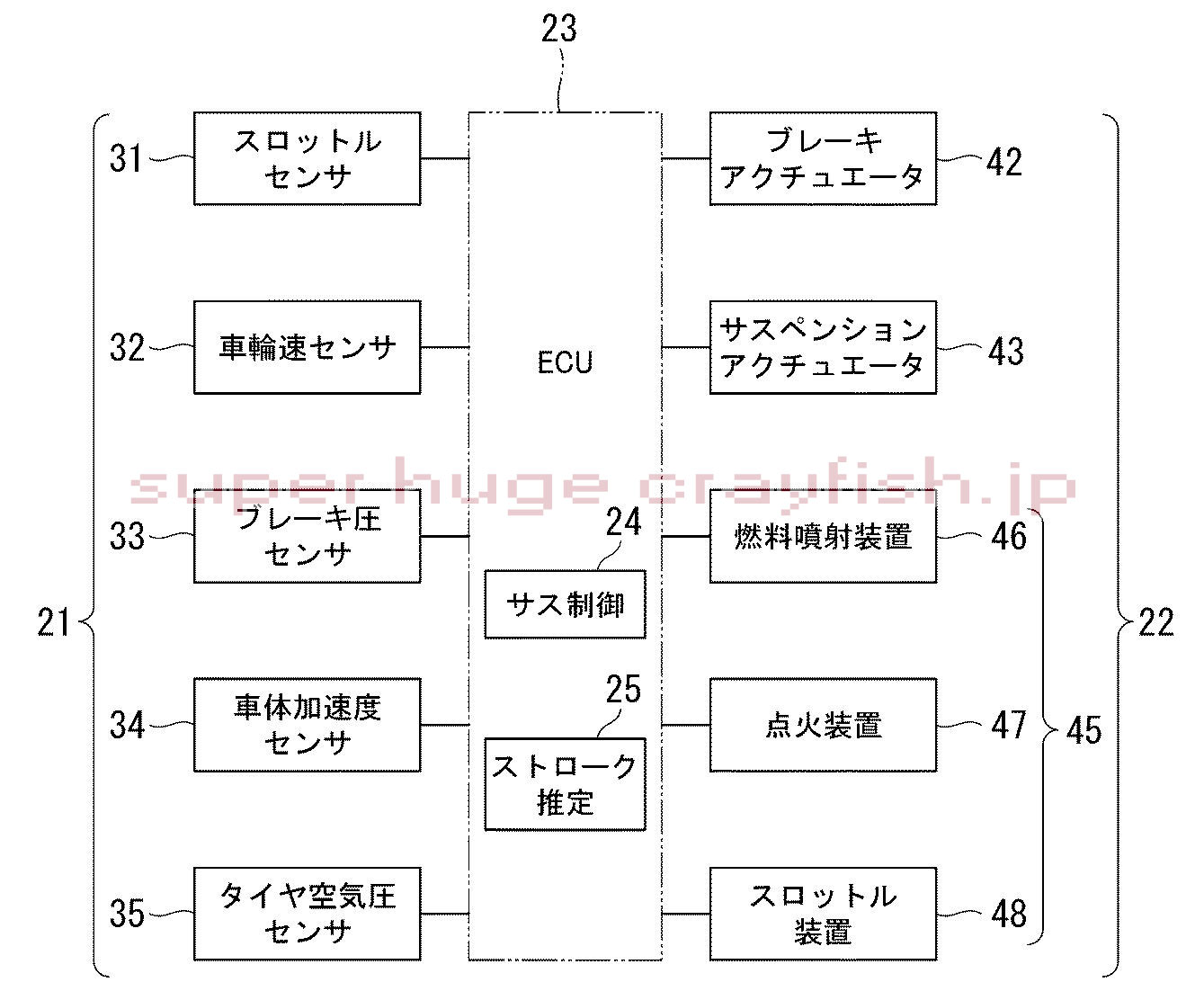
上記の通りにたくさんセンサー類が付いてます。といっても現行ゴールドウイングにも全部ついてますよね。ストローク推定部はついて無いと思いますが。
カーブしてるか否かを判断する
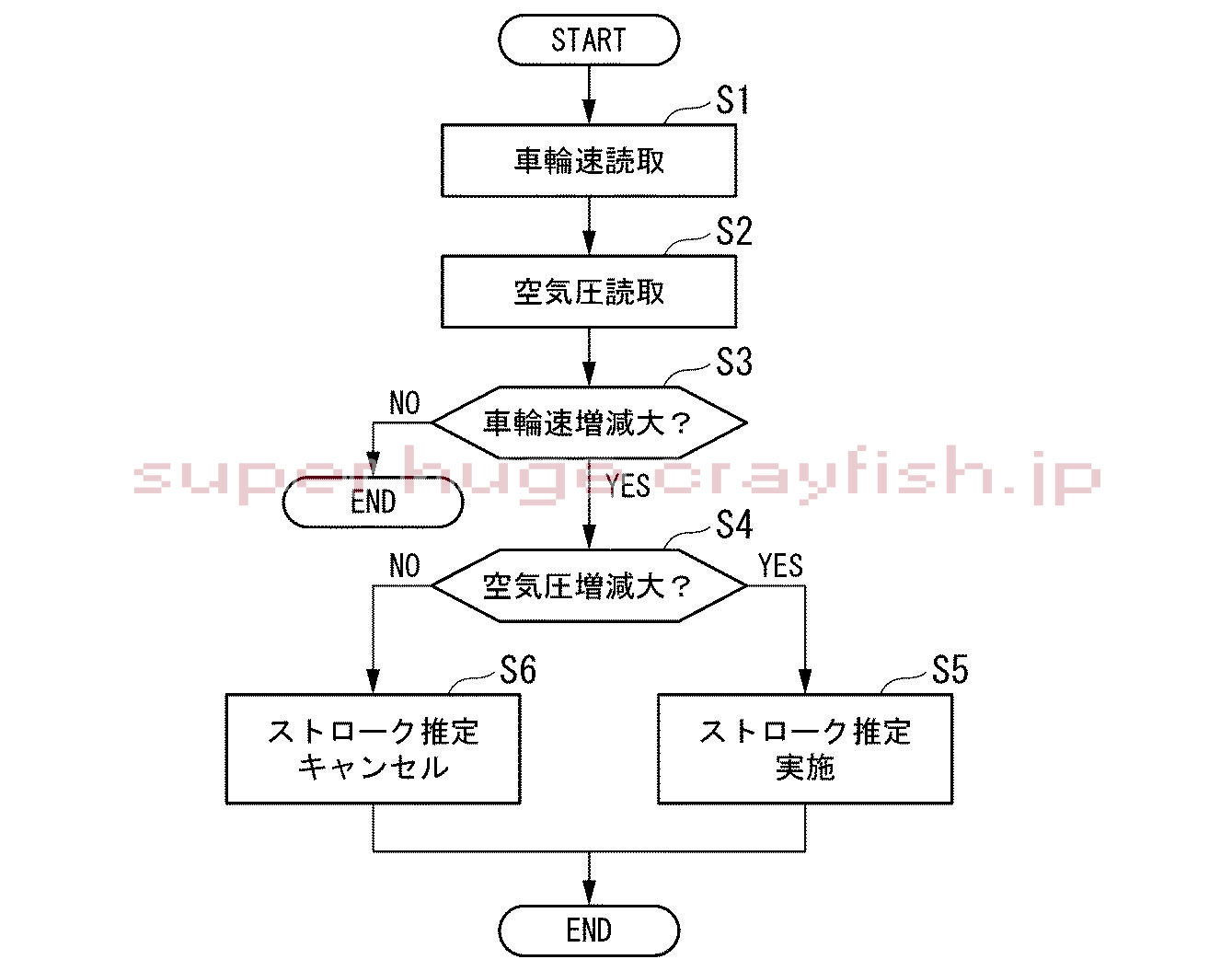

上記課題の解決手段として、請求項1に記載した発明は、車体をバンクさせて旋回する車両(1)のサスペンション制御装置において、車輪(2,12)を懸架し、前記車輪(2,12)からの荷重入力でストロークするサスペンション(3e,13)と、前記車輪(2,12)の回転速度を検出する車輪速センサー(32f,32r)と、前記車両(1)の旋回状態を判定するためのパラメータを検出するパラメータ検出手段(35f,35r)と、前記車輪速センサー(32f,32r)の検出情報を用いて前記サスペンション(3e,13)のストローク量を推定する制御部(23)と、を備え、前記制御部(23)は、前記パラメータ検出手段(35f,35r)の検出情報から前記車両(1)の旋回状態でないと判定した場合に、前記車輪速センサー(32f,32r)の検出情報による前記ストローク量の推定を行うことを特徴とするサスペンション制御装置を提供する。
この構成によれば、車両が非旋回状態にあるときにのみ、車輪速センサーの検出情報に基づくサスペンションのストローク量の推定を行い、車両が旋回状態にあるときは、車輪速センサーの検出情報に基づくストローク推定をキャンセルすることが可能となる。このため、車体をバンクさせて旋回する車両において、旋回時のタイヤの周長変化の影響を受けることなく、車輪速センサーの検出情報から正確にストローク推定を行うことができる。
タイヤの空気圧でカーブしてるか否か判断するのって今までありましたっけ?2021-146943です。
新型ゴールドウイングは色々付きそう
色々特許が出願されてまして…
- カメラ、レーダー
- アダプティブクルーズコントロール
- 電子制御サスペンション(現行についてないぞ)
- 衝突軽減
- 操舵アシスト
- 車線維持支援
- 車線逸脱警報
- 車線逸脱抑制
って感じで、特許の通りになるならほぼ車と変わらない先進安全機能が搭載されそう。
ホンダはこの辺自社開発でやってるのでなんだか嬉しいですね。
大体そんな感じです。
次期ゴールドウイングですけど、えらく豪華になりそう。恐らくは最上級グレードとして追加されるんでしょうね。
以前から出るって噂ですけど、こういう状況ですのでまだ遅れますかねぇ。早くても2022年発表の2023年モデルとかでしょうか。根拠はないよ。